

nema42 stepper motor၊ stepper motor၊ stepping motor၊nema42
nema42 stepper မော်တာstepper motor ၊ stepping motor ၊nema42,
nema42, nema42 stepper မော်တာ, Stepper Motor, Stepping Motor,
NEMA42 လွယ်ကူသော Servo စီးရီး (NEMA42 Closed Loop စီးရီး)
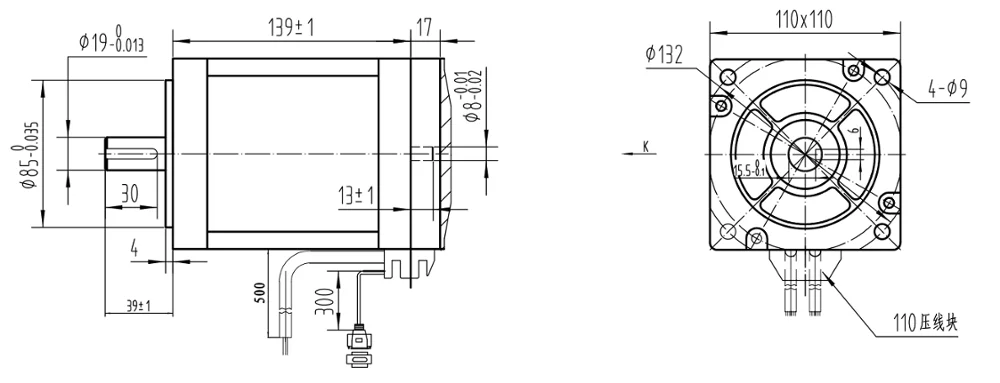
မော်တာ လျှပ်စစ်ဆိုင်ရာ ကန့်သတ်ချက်များ
| မုဒ် | အဆင့်ထောင့် | လက်ရှိ (A) | ခုခံမှု (Ω±10%) | Inductance (mH±20%) | ကိုင်ဆွဲအား (Nm) | မော်တာအရှည်(mm) | ကုဒ်ကိရိယာ ကြည်လင်ပြတ်သားမှု (PPR) | အသုံးပြုနိုင်သော Driver |
| 110HCE12N-B39 | 1.2° | ၄.၂ | ၁.၂ | 13 | 12 | ၁၃၉ | ၁၀၀၀ | 3HSS2260 |
| 110HCE20N-B39 | 1.2° | ၄.၂ | ၁.၈၈ | 18 | 20 | ၂၂၁ | ၁၀၀၀ | 3HSS2260 |
မော်တာအတိုင်းအတာ: မီလီမီတာ
Torque/Frequency Curve
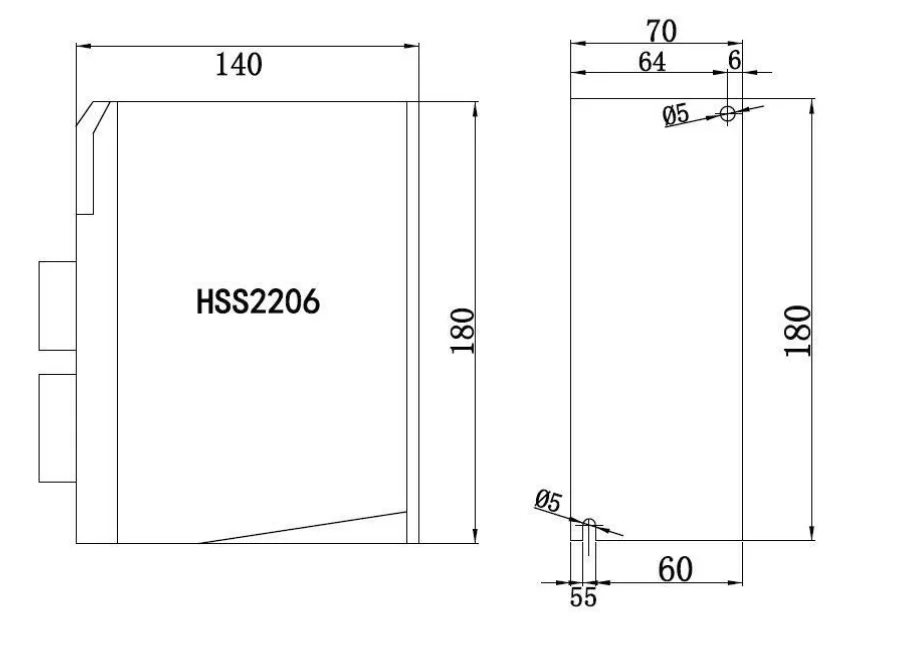
ယာဉ်မောင်း 3HSS2260
အင်္ဂါရပ်များ
1၊ 32-bit DSP နှင့် vector closed-loop ထိန်းချုပ်မှုနည်းပညာ
2၊ ခြေလှမ်းမဆုံးရှုံးဘဲ၊ မြင့်မားသောအနေအထားတွင်တိကျမှု
3၊ မော်တာအထွက် torque နှင့် အလုပ်လုပ်သောအမြန်နှုန်းကို မြှင့်တင်ပါ။
4၊ ပြောင်းလဲနိုင်သောလက်ရှိထိန်းချုပ်မှုနည်းပညာ၊ မော်တာအပူချိန်မြင့်တက်မှုကိုထိန်းချုပ်ပါ။
5၊ အမျိုးမျိုးသော စက်ဝန်အခြေအနေများ (တောင့်တင်းမှုနည်းသော ပူလီများအပါအဝင်)၊
gain parameter ကိုချိန်ညှိရန်လိုအပ်သည်။
6၊ ချောမွေ့ပြီး ယုံကြည်စိတ်ချရသော ရွေ့လျားခြင်း၊ တုန်ခါမှုနည်းခြင်း၊ အရှိန်အဟုန်မြှင့်ခြင်းနှင့် ကြီးမားသောတိုးတက်မှု
အရှိန်မြှင့်
7၊ တုန်ခါမှုမရှိဘဲ သုညအမြန်နှုန်းတည်ငြိမ်မှုစွမ်းရည်
8၊ 3-phase 86(NEMA34) နှင့် 110(NEMA 42) ဟိုက်ဘရစ်ဆာဗာမော်တာသို့ လိုက်လျောညီထွေဖြစ်အောင်
9၊ အမြင့်ဆုံးခြေလှမ်း-သွေးခုန်နှုန်း 200KHZ
10၊ Micro အဆင့် 400-60000 pulse/rev
11, ဗို့အားအကွာအဝေး AC150-240V
12၊ OverCurrent၊ Over Voltage နှင့် Over Position ကို ကာကွယ်ခြင်း။
13၊ ခြောက်ခုသော ဒစ်ဂျစ်တယ်ပြွန်ပြသမှု၊ ကန့်သတ်ချက်များကို သတ်မှတ်ရန် လွယ်ကူပြီး မော်တာလည်ပတ်မှုကို စောင့်ကြည့်ပါ။
ပြည်နယ်
Microstep ရွေးချယ်မှု-
| ကုဒ် | အဓိပ္ပါယ် | အပိုင်းအခြား | မူလတန်ဖိုး | မှတ်ချက် |
| PA0 | ဗားရှင်းနံပါတ် | ၅၀၁ | ပြုပြင်မွမ်းမံရန် တားမြစ်ထားသည်။ | |
| PA1 | ထိန်းချုပ်မုဒ် ရွေးချယ်မှု | 0~2 | 0 | |
| PA2 | မော်တာအမျိုးအစား ရွေးချယ်မှု | 0~2 | 0 | |
| PA3 | မျက်နှာပြင်ကို ပါဝါဖွင့်ပါ။ | 0~7 | 0 | |
| PA4 | လက်ရှိ Loop Kp | 0~1000 | ၂၀၀ | ပြုပြင်မွမ်းမံရန် တားမြစ်ထားသည်။ |
| PA5 | လက်ရှိ Loop Ki | 0~1000 | ၃၀၀ | ပြုပြင်မွမ်းမံရန် တားမြစ်ထားသည်။ |
| PA6 | အနေအထား Loop Kp | 0~1000 | ၃၀၀ | |
| PA7 | မိုက်ခရိုအဆင့်များ ဆက်တင် | 400~60000 | ၄၀၀၀ | |
| PA8 | ကုဒ်ကိရိယာ ကြည်လင်ပြတ်သားမှု (1000) | ၄၀၀၀ | ပြုပြင်မွမ်းမံရန် တားမြစ်ထားသည်။ | |
| PA9 | ကုဒ်ကိရိယာ ကြည်လင်ပြတ်သားမှု (1000) | 40~30000 | ၁၀၀၀ | |
| PA10 | လက်ရှိ ကိုင်ဆောင်ထားသည်။ | ၁၀~၁၀၀ | 40 | |
| PA11 | Closed Loop Current | ၁၀~၁၀၀ | ၁၀၀ | |
| PA12 | ယူထား | |||
| PA13 | ယူထား | |||
| PA14 | အဆင့်ကိုဖွင့်ပါ။ | ၀/၁ | 0 | |
| PA15 | နှိုးစက်အဆင့် | ၀/၁ | 0 | |
| PA16 | Pulse မုဒ် ရွေးချယ်မှု | ၀/၁ | 0 | |
| PA17 | Pulse Edge | ၀/၁ | 0 | |
| PA18 | မော်တာ လှည့်ခြင်း ဦးတည်ချက် | ၀/၁ | 0 | |
| PA19 | JOG မြန်နှုန်း | ၁~၂၀၀ | 60 | |
| PA20 | PEND Mode အပိုင်း | ၀/၁ | 0 | |
| PA21 | PEND အဆင့် | ၀/၁ | 0 |
ယာဉ်မောင်းအတိုင်းအတာ (မီလီမီတာ)
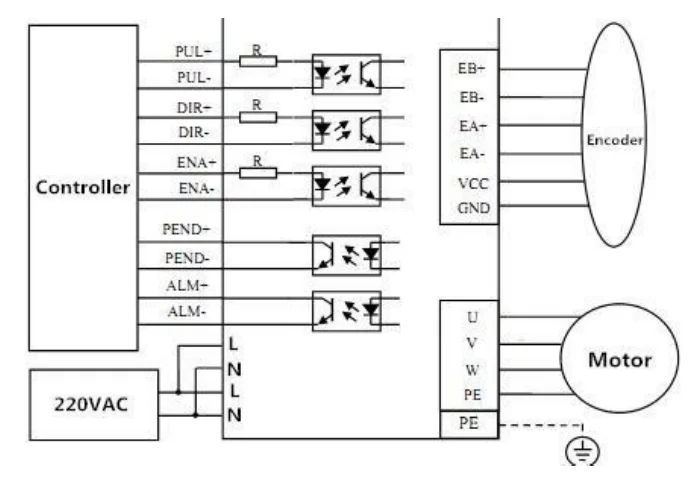
Wiring Diagram-
nema42Stepper မော်တာ ၊
stepper motor၊
stepping motor၊
nema42



,planetary gearbox,worm gearbox,reliable and durable,suitable for all kinds of motors, such as dc motors ,servo motors and stepper motor,to get bigger torque")
