
ဤပရောဂျက်သည် TV သို့မဟုတ် DVD အဝေးထိန်းခလုတ်ကို အသုံးပြု၍ DC မော်တာအား ရှေ့သို့ ပြောင်းပြန်သို့ ဦးတည်ရွေ့လျားနိုင်ပုံကို ဖော်ပြသည်။ရည်ရွယ်ချက်မှာ မိုက်ခရိုကွန်ထရိုလာ သို့မဟုတ် ပရိုဂရမ်းမင်းကို အသုံးမပြုဘဲ ရည်ရွယ်ချက်အတွက် modulated infrared (IR) 38kHz pulse ရထားကို အသုံးပြုသည့် ရိုးရှင်းသော bi-directional motor driver ကို တည်ဆောက်ရန်ဖြစ်သည်။
စာရေးသူ၏ ရှေ့ပြေးပုံစံကို ပုံ ၁ တွင် ပြထားသည်။

ပတ်လမ်းနဲ့ အလုပ်လုပ်တယ်။
ပရောဂျက်၏ circuit diagram ကို ပုံ 2 တွင်ပြသထားသည်။ ၎င်းကို IR လက်ခံကိရိယာ module TSOP1738 (IRRX1)၊ decade counter 4017B (IC2)၊ motor driver L293D (IC3)၊ PNP transistor BC557 (T1)၊ BC547 NPN transistor နှစ်လုံး ( T2 နှင့် T3)၊ 5V ထိန်းညှိပါဝါထောက်ပံ့မှု (IC1) နှင့် 9V ဘက်ထရီ။
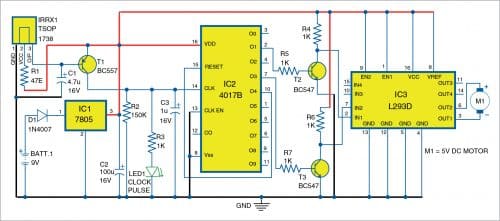
ပရောဂျက်အတွက် လိုအပ်သော 5V DC ကိုထုတ်ပေးရန် 9V ဘက်ထရီအား diode D1 မှတဆင့် ဗို့အားထိန်းညှိပေးသော 7805 သို့ ချိတ်ဆက်ထားသည်။Capacitor C2 (100µF, 16V) အား လှိုင်းပုတ်ခြင်းကို ငြင်းပယ်ရန်အတွက် အသုံးပြုသည်။
ပုံမှန်အခြေအနေအောက်တွင်၊ IR module IRRX1 ၏ အထွက် pin 3 သည် logic မြင့်မားနေသည်၊ ဆိုလိုသည်မှာ ၎င်းနှင့်ချိတ်ဆက်ထားသော transistor T1 သည် ဖြတ်တောက်ပြီးဖြစ်သောကြောင့် ၎င်း၏စုဆောင်းသူဂိတ်သည် ယုတ္တိနည်းပါသည်။T1 စုဆောင်းသူသည် ဆယ်စုနှစ်ကောင်တာ IC2 ၏ နာရီခုန်နှုန်းကို မောင်းနှင်သည်။
အဝေးထိန်းခလုတ်ကို IR module ဆီသို့ ညွှန်ပြပြီး မည်သည့်သော့ကို နှိပ်သောအခါ၊ module သည် အဝေးထိန်းခလုတ်မှ 38kHz IR pulses ကို လက်ခံရရှိမည်ဖြစ်သည်။ဤပဲမျိုးစုံများကို T1 စုဆောင်းသူတွင် ပြောင်းပြန်လှန်လိုက်ပြီး decade counter IC2 ၏ clock input pin 14 သို့ ပေးသည်။
ရောက်ရှိလာသော IR ပဲမျိုးစုံများသည် တူညီသောနှုန်း (38kHz) ဖြင့် ဆယ်စုနှစ်ကောင်တာသို့ တိုးလာသော်လည်း IC2 ၏ clock input pin 14 တွင် RC filter (R2=150k နှင့် C3=1µF) ပါဝင်ခြင်းကြောင့် ပဲမျိုးစုံရထားသည် တစ်ခုတည်းသောသွေးခုန်နှုန်းအဖြစ် ပေါ်လာသည်။ ကောင်တာထို့ကြောင့် သော့တစ်ခုစီကို နှိပ်လိုက်သောအခါ ကောင်တာသည် တစ်ခုတည်းသော အရေအတွက်ဖြင့်သာ တိုးတက်လာသည်။
အဝေးထိန်းခလုတ်ကို လွှတ်လိုက်သောအခါ၊ capacitor C3 သည် resistor R2 မှတဆင့် ထွက်သွားပြီး နာရီလိုင်းသည် သုညဖြစ်သွားသည်။ထို့ကြောင့် အသုံးပြုသူသည် အဝေးထိန်းခလုတ်ကို နှိပ်လိုက်တိုင်း၊ ကောင်တာသည် ၎င်း၏နာရီအဝင်တွင် သွေးခုန်နှုန်းတစ်ခုတည်းကို လက်ခံရရှိပြီး သွေးခုန်နှုန်းကိုရရှိကြောင်း အတည်ပြုရန် LED1 တောက်ပလာမည်ဖြစ်သည်။
လည်ပတ်နေစဉ်တွင် ဖြစ်နိုင်ခြေငါးခုရှိနိုင်သည်။
အမှုတွဲ ၁
ရီမုတ်၏သော့ကို ဖိလိုက်သောအခါ၊ ပထမသွေးခုန်နှုန်းရောက်ရှိပြီး ဆယ်စုနှစ်ကောင်တာ (IC2) ၏ O0 အထွက်နှုန်းသည် မြင့်မားနေချိန်တွင် ပင်နံပါတ် O1 မှ O9 သည် နိမ့်နေသည်၊ ဆိုလိုသည်မှာ ထရန်စစ္စတာ T2 နှင့် T3 သည် ဖြတ်တောက်သည့်အခြေအနေတွင် ရှိနေသည်။ထရန်စစ္စတာ နှစ်ခုလုံး၏ စုဆောင်းသူများကို 1-kilo-ohm resistors (R4 နှင့် R6) ဖြင့် မြင့်မားသောအခြေအနေသို့ ဆွဲထုတ်သောကြောင့် motor driver L293D (IC3) ၏ input terminals IN1 နှင့် IN2 နှစ်ခုစလုံးသည် မြင့်မားလာပါသည်။ဤအဆင့်တွင်၊ မော်တာသည် အခြေအနေမကောင်းပါ။
အမှုတွဲ ၂
သော့ကို ထပ်မံနှိပ်လိုက်သောအခါ၊ CLK လိုင်းသို့ရောက်လာသော ဒုတိယသွေးခုန်နှုန်းသည် ကောင်တာတစ်ခုပြီးတစ်ခုတိုးလာသည်။ဆိုလိုသည်မှာ၊ ဒုတိယ pulse ရောက်ရှိလာသောအခါ၊ IC2 ၏ O1 output သည် မြင့်မားသွားပြီး ကျန်ရှိသော output များမှာ နည်းနေပါသည်။ထို့ကြောင့် transistor T2 conducts နှင့် T3 ကိုဖြတ်ထားသည်။ဆိုလိုသည်မှာ T2 ၏စုဆောင်းသည့်ဗို့အားနိမ့်သွားသည် (IN1 ၏ IC3) နှင့် T3 ၏စုဆောင်းသည့်ဗို့အား (IN2 ၏ IC3) မြင့်မားလာပြီး မော်တာမောင်းသူ IC3 ၏ IN1 နှင့် IN2 တို့သည် 0 နှင့် 1 အသီးသီးဖြစ်လာသည်။ဤအခြေအနေတွင် မော်တာသည် ရှေ့ဦးတည်ရာသို့ လှည့်သည်။
အမှုတွဲ ၃
သော့ကို နောက်တစ်ကြိမ် နှိပ်လိုက်သောအခါ၊ CLK လိုင်းသို့ ရောက်ရှိလာသော တတိယသွေးခုန်နှုန်းသည် ကောင်တာတစ်ခုပြီးတစ်ခု ထပ်တိုးလာသည်။ဒါကြောင့် IC2 ရဲ့ O2 output က မြင့်မားပါတယ်။O2 pin နှင့် ချိတ်ဆက်ထားခြင်းမရှိသောကြောင့် output pins O1 နှင့် O3 နည်းပါးသောကြောင့် transistor T2 နှင့် T3 နှစ်ခုလုံးသည် cut-off အခြေအနေသို့သွားပါသည်။
ထရန်စစ္စတာ နှစ်ခုလုံး၏ စုဆောင်းသည့် တာမီနယ်များကို 1-kilo-ohm resistors R4 နှင့် R6 ဖြင့် ဆွဲယူသည်၊ ဆိုလိုသည်မှာ IC3 ၏ IN1 နှင့် IN2 ၏ input terminal များသည် မြင့်မားလာပါသည်။ဤအဆင့်တွင် မော်တာသည် ချွတ်ယွင်းသွားပြန်သည်။
အမှုတွဲ ၄
သော့ကို တစ်ကြိမ်ထပ်နှိပ်သောအခါ၊ CLK လိုင်းသို့ရောက်ရှိသည့် စတုတ္ထသွေးခုန်နှုန်းသည် ကောင်တာအား စတုတ္ထအကြိမ်အဖြစ် တစ်ခုပြီးတစ်ခုတိုးလာသည်။ယခုအခါ IC2 ၏ O3 အထွက်နှုန်းမှာ မြင့်မားနေပြီး ကျန်အထွက်များ နည်းပါးသောကြောင့် transistor T3 သည် လုပ်ဆောင်သည်။ဆိုလိုသည်မှာ T2 ၏ စုဆောင်းသည့်ဗို့အား မြင့်မားလာသည် (IC3 ၏ IN1) နှင့် T3 စုဆောင်းသည့်ဗို့အား နိမ့်သွားသည် (IC3 ၏ IN2) ဖြစ်သည်။ထို့ကြောင့် IC3 ၏ IN1 နှင့် IN2 သည် 1 နှင့် 0 အဆင့်တွင် အသီးသီးရှိသည်။ဤအခြေအနေတွင် မော်တာသည် ပြောင်းပြန်ဦးတည်ချက်ဖြင့် လှည့်သည်။
အမှုတွဲ ၅
သော့ကို ပဉ္စမအကြိမ် ဖိသောအခါ၊ ပဉ္စမမြောက် သွေးခုန်နှုန်းသည် CLK လိုင်းသို့ ရောက်ရှိလာပြီး ကောင်တာအား တစ်ကြိမ် ထပ်မံတိုးလာသည်။O4 (IC2 ၏ ပင်နံပါတ် 10) ကို IC2 ၏ input pin 15 ကို ပြန်လည်သတ်မှတ်ရန် ကြိုးတပ်ထားသောကြောင့် ပဉ္စမအကြိမ်ကို နှိပ်ခြင်းဖြင့် ဆယ်စုနှစ် ကောင်တာ IC အား O0 မြင့်မားသော ပါဝါ-ဖွင့်-ပြန်လည်သတ်မှတ်မှု အခြေအနေသို့ ပြန်လည်ရောက်ရှိစေပါသည်။
ထို့ကြောင့်၊ circuit သည် infrared remote control ဖြင့်ထိန်းချုပ်ထားသော bi-directional motor driver အဖြစ်လုပ်ဆောင်သည်။
ဆောက်လုပ်ရေးနှင့်စမ်းသပ်မှု
ပတ်လမ်းကို Veroboard သို့မဟုတ် PCB တွင် တပ်ဆင်နိုင်ပြီး ပုံ 3 တွင် အမှန်တကယ် အရွယ်အစား အပြင်အဆင်ကို ပြထားသည်။ PCB အတွက် အစိတ်အပိုင်းများ အပြင်အဆင်ကို ပုံ 4 တွင် ပြထားသည်။
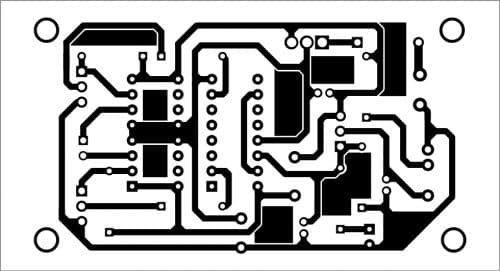
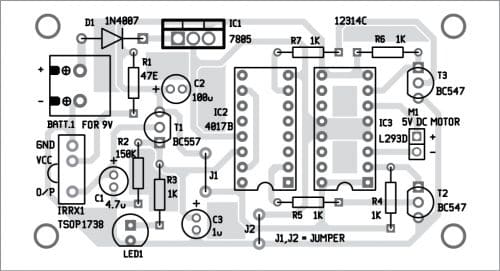
PCB နှင့် အစိတ်အပိုင်း အပြင်အဆင် PDF များကို ဒေါင်းလုဒ်လုပ်ပါ-ဤနေရာကိုကလစ်နှိပ်ပါ
ဆားကစ်ကို တပ်ဆင်ပြီးနောက် BATT.1 ကိုဖြတ်၍ 9V ဘက်ထရီကို ချိတ်ဆက်ပါ။လုပ်ဆောင်ချက်အတွက် အမှန်တရားဇယား (ဇယား 1) ကို ကိုးကားပြီး အထက်ဖြစ်ရပ် 1 မှ Case 5 တွင်ဖော်ပြထားသည့် အဆင့်များကို လိုက်နာပါ။
Lisa တည်းဖြတ်သည်။
တင်ချိန်- စက်တင်ဘာ ၂၉-၂၀၂၁